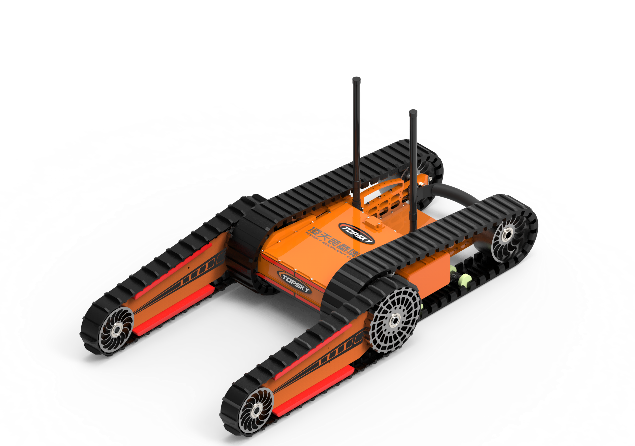
RXR-C10D Robot żgħir ta' tkixxif tan-nar


| Ir-robots tat-tkixxif tan-nar jintużaw prinċipalment biex jissostitwixxu ambjenti fjammabbli, splussivi, kumplessi u ħarxa oħra li joqorbu artifiċjalment għal tkixxif ambjentali u skoperta tal-gass.Jistgħu jintużaw ukoll għal tkixxif fi spazji żgħar u baxxi bħall-qiegħ tal-karrozzerija tal-karozza u l-qiegħ tal-ixkaffa.Ix-chassis jadotta struttura tad-driegħ tat-tkaxkir + doppju ta 'quddiem, li tista' taqsam ostakli vertikali ta '280mm l-aktar, u tista' titla' pjattaforma ta '360mm, li tista' tadatta għal diversi terreni għal skjerament ta 'ġlied rapidu.L-interface ta 'espansjoni b'ħafna funzjonijiet tista' tkun mgħammra b'moduli ta 'karrozzerija differenti.Fl-istess ħin, ir-robot huwa mgħammar b'kontroll bil-fili, li jista 'jopera mill-bogħod permezz tal-fili taħt il-kundizzjoni ta' interferenza tas-sinjal.L-armi swing doppji tar-robot jistgħu jiġu żarmati liberament, li jistgħu jintużaw f'aktar xenarji. |
| 2.Karatteristiċi |
| 1. Smart remote controlMulti-funzjoni espansjoni buttuna Operazzjoni viżwalizzata skrin kbir 2. Modularizzazzjoni tal-magna kollha Modularizzazzjoni tax-chassis, modularizzazzjoni tal-batterija, modularizzazzjoni tas-sospensjoni 3.Prestazzjoni eċċellenti fit-tixbit, it-tixbit tat-taraġ, il-qsim ta 'ostakli u l-qsim ta' trinek Jista 'jitla' għoljiet ta' 45 grad Jista 'jitla' taraġ ta '40 grad Jista 'jitla' ostakli vertikali ta' 28 ċm Jista' jifrex 41 ċm trinek wiesgħa 4.Sistema tal-vidjo Mod ta 'komunikazzjoni ta' 3 punti, biex issolvi operazzjonijiet normali f'ambjent mhux viżwali, distanza ta 'komunikazzjoni 1km Kamera HD b'2 kanali 5.Moduli ta 'espansjoni multipli Modulu Lidar, modulu ta 'skoperta tal-gass, modulu tal-gimbal ta' tkixxif, modulu tad-driegħ robotiku
Erba 'portijiet ta' plagg tal-avjazzjoni estiżi, RS232, RS485, CAN riżervati, port tan-netwerk, 24V, 12V (normalment magħluqa)
|
| 3.Tparametri tekniċi3.1 Ir-robot kollu: 1. Isem: RXR-C10D robot żgħir ta' tkixxif tan-nar (B) 2. Mudell: RXR-C10D 3. Funzjoni bażika: funzjoni ta 'tkixxif bil-vidjo 4. Livell ta 'protezzjoni: il-livell ta' protezzjoni tar-robot kollu huwa IP67 5. Enerġija: batterija tal-litju elettrika, ternarja 6.Size: ≤length 610mm × wisa 490mm × għoli 200mm (mingħajr antenna) 7. Dijametru tat-tidwir: iduru fil-post 8.Weight: ≤25kg 9. Veloċità lineari massima: ≥2.7m/s, kontroll remot veloċità stepless 10. Ammont ta 'devjazzjoni dritta: ≤5% 11.Abbiltà tat-tixbit: ≥45° 12. Abbiltà tat-tixbit: ≥40° 13. Għoli tal-qsim tal-ostakli: ≥280mm 14.Ħin tal-mixi kontinwu: ≥2h 15. Distanza tal-kontroll mill-bogħod mingħajr fili: 500m (miftuħa) 16. Distanza tat-trasmissjoni tal-vidjo bla fili: 500m (miftuħa) komunikazzjoni f'żewġ punti;Komunikazzjoni ta 'tliet punti ta' 800m (miftuħa) biex tissodisfa x-xena tal-okklużjoni (mhux obbligatorja); 17.Distanza ta 'kontroll mill-bogħod bil-fili: 100m 18.Distanza ta 'trasmissjoni tal-vidjo bil-fili: 100m 19.Robot crawler: It-tkaxkir tar-robot għandu jkun magħmul minn gomma ritardant tal-fjammi, anti-statika u reżistenti għat-temperatura għolja, b'Kevlar ġewwa, b'disinn ta 'protezzjoni kontra d-derailment
3.2 Perċezzjoni tal-vidjo robot: 1.Numru u konfigurazzjoni ta 'kameras: Iż-żewġ kameras ta' definizzjoni għolja fuq il-ġisem jistgħu jiġu jaraw u kkontrollati fl-istess ħin, u l-ambjent madwar ix-xena jista 'jiġi ppreżentat b'mod stabbli lill-kontrollur remot, li jista' jissodisfa s-sewqan bla fili tal- robot u ttejjeb ħafna l-effiċjenza tal-ġlieda kontra. 3.3 Parametri tal-konfigurazzjoni tat-terminal tal-kontroll mill-bogħod 1. Dimensjonijiet: 362 * 188 * 40 (Eskluża l-għoli tal-rocker) 2. Piż sħiħ tal-magna: 2.5kg 3. Display: mhux inqas minn 10 pulzieri skrin LCD ta 'luminożità għolja, 4 kanali ta' swiċċjar tas-sinjal tal-vidjo 4. Pjattaforma tas-sistema ta 'kontroll: sistema operattiva window10 5.Ħin tax-xogħol: 2h (kontinwu) 6. Funzjonijiet bażiċi: Il-kontroll mill-bogħod u l-monitor huma integrati u portabbli, li jistgħu jiġu jaraw u kkontrollati fl-istess ħin, u l-ambjent madwar ix-xena jista 'jiġi ppreżentat b'mod stabbli lill-operatur remot. (Funzjoni mhux obbligatorja) Wirja f'ħin reali tal-korp tal-vettura u l-qawwa tal-batterija tal-kaxxa tal-kontroll mill-bogħod, id-distanza tal-mixi u informazzjoni oħra, u tista 'tikkontrolla l-movimenti 'l quddiem, lura u l-isteering tar-robot.Il-metodu ta 'trażmissjoni tad-dejta huwa trasmissjoni mingħajr fili bl-użu ta' sinjal kriptat 7.Funzjoni ta 'reġistrazzjoni u daqq tal-vidjo: vidjo jista' jiġi rreġistrat fi kwalunkwe ħin, u l-kontenut tal-vidjow irreġistrat jista 'jiġi ssejvjat awtomatikament, u l-vidjow jista' jintlagħab direttament fuq it-terminal tal-kontroll mill-bogħod, jew il-vidjow jista 'jiġi kkupjat għal apparati oħra 8. Funzjoni ta 'kontroll tal-mixi: Iva, 1 joystick jirrealizza l-operazzjoni flessibbli tar-robot 'il quddiem, lura, dawra tax-xellug u dawra tal-lemin 9. Swiċċ tal-vidjo: Iva, swiċċ tal-jog awto-reset 10. Funzjoni ta 'kontroll tad-dawl: Iva, toggle switch
4.4 Oħrajn: Rukkell ta 'komunikazzjoni bil-fili ta' 100m Tul: 100mm |
| 4.Konfigurazzjoni tal-prodott |
| 1. RXR-C10D robot żgħir ta 'tkixxif tan-nar (B) 1 set2.Kaxxa tal-kontroll mill-bogħod (inkluża l-batterija) 1 sett 3. Ċarġer tal-kontroll mill-bogħod (12.6V) 1 pcs 4. Ċarġer tal-ġisem tar-robot (25.2V) 1 1 pcs 5. 1.4GHZ antenna ta 'trasmissjoni ta' immaġni 4 pcs 6. Komunikazzjoni bil-fili 100 metru rukkell 1 pcs 7. Għodod awżiljarji 1 sett |